|
|
| AbstractCameraController (Camera *camera_=nullptr, const std::string zeqSession=std::string()) |
| |
|
Camera * | camera (void) |
| |
|
void | update (void) |
| |
|
void | anim (const float deltaTime_=1.0f/60) |
| |
|
void | startAnim (CameraAnimation *cameraAnimation_, bool loop_=false) |
| |
|
void | stopAnim (void) |
| |
|
bool | isAniming (void) const |
| |
|
virtual void | position (const Eigen::Vector3f &position_) |
| |
|
virtual Eigen::Vector3f | position (void) const |
| |
|
void | rotation (const Eigen::Matrix3f &rotation_) |
| |
|
void | rotation (const Eigen::Vector3f &rotationAngles_) |
| |
|
Eigen::Matrix3f | rotation (void) const |
| |
|
void | radius (float radius_) |
| |
|
float | radius (void) const |
| |
|
void | translate (const Eigen::Vector3f &translation_) |
| |
|
virtual void | localTranslate (const Eigen::Vector3f &translation_)=0 |
| |
|
void | rotate (const Eigen::Matrix3f &rotation_) |
| |
|
void | rotate (const Eigen::Vector3f &rotationAngles_) |
| |
|
void | windowSize (int width_, int height_) |
| |
|
Eigen::Matrix3f | rotationMatrixFromAngles (const Eigen::Vector3f &rotationAngles_) |
| |
|
|
virtual void | _conformSetViewMatrix (const Eigen::Vector3f &position_, const Eigen::Matrix3f &rotation_, float radius_)=0 |
| |
|
void | _setCameraViewMatrix (const Eigen::Matrix4f &viewMatrix_) |
| |
|
|
Camera * | _camera |
| |
|
Eigen::Vector3f | _position |
| |
|
Eigen::Matrix3f | _rotation |
| |
|
float | _radius |
| |
|
bool | _isAniming |
| |
|
float | _currentAnimTime |
| |
|
CameraAnimation * | _currentAnim |
| |
|
bool | _loopAnim |
| |
Definition at line 46 of file AbstractCameraController.h.
The documentation for this class was generated from the following file:
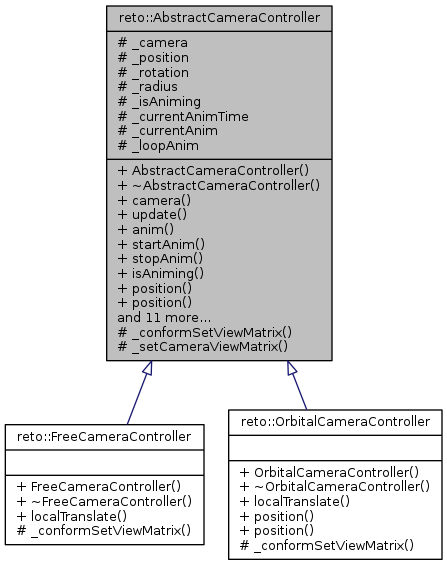
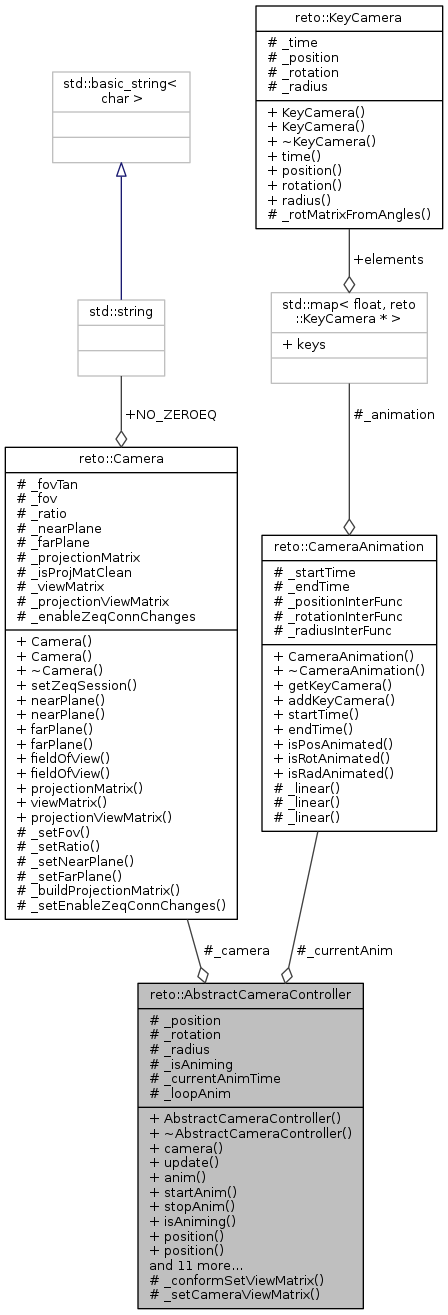
 Inheritance diagram for reto::AbstractCameraController:
Inheritance diagram for reto::AbstractCameraController: 1.8.11
1.8.11